Tech Knowledge Note 독자 여러분, 안녕하세요! 어제 우리는 자율주행차의 '눈과 귀' 역할을 하는 다양한 센서들을 간략하게 살펴보았습니다. 오늘은 그 센서들을 조금 더 깊이 파고들어, 각각 어떤 특징과 장단점을 가지고 있는지, 그리고 왜 이 센서들을 '함께' 사용하는 것이 중요한지에 대한 흥미로운 이야기를 풀어보려고 합니다. 마치 명품 오케스트라의 악기들처럼, 각자의 고유한 역할과 조화로운 협연이 완벽한 자율주행 시스템을 만들어내는 비밀을, 지금부터 함께 파헤쳐 볼까요?
자율주행 센서, 핵심 3인방 집중 분석
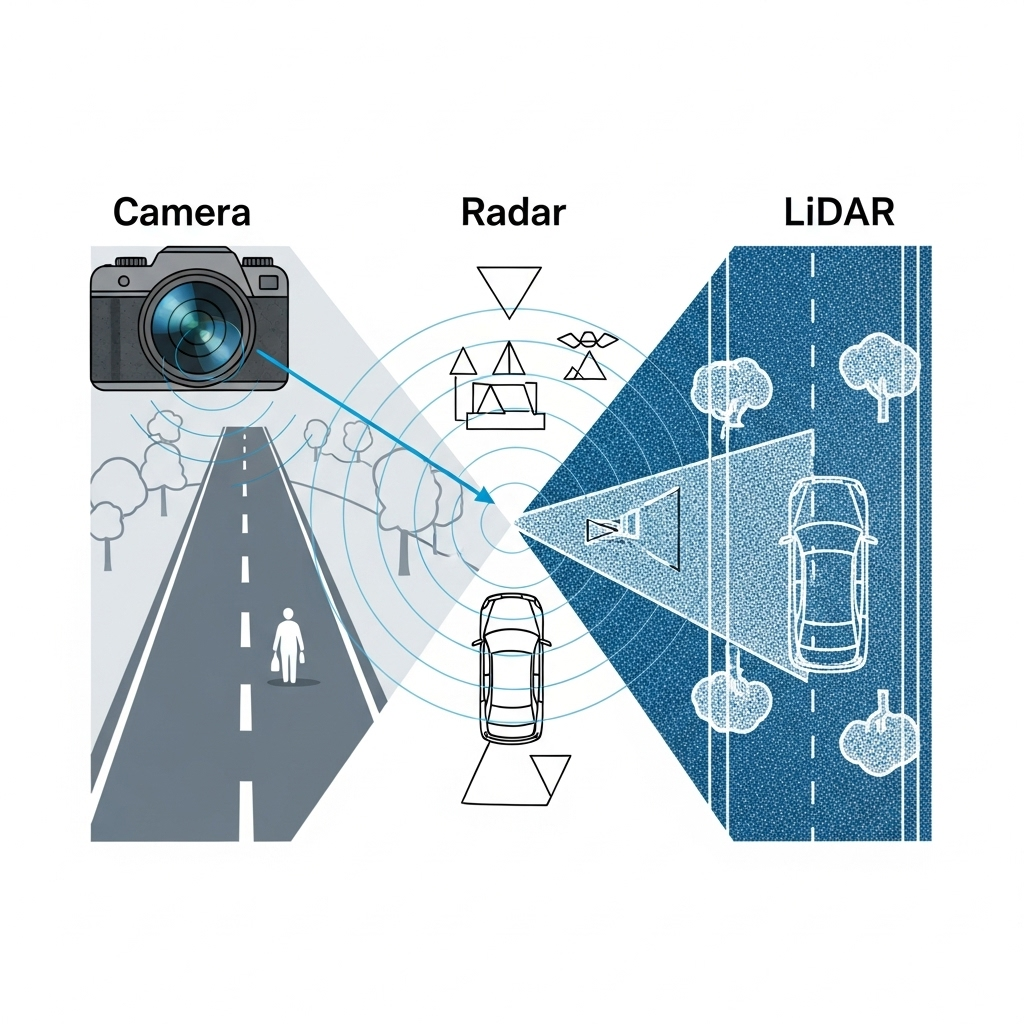
자율주행 센서 중에서도 가장 핵심적인 역할을 수행하는 카메라, 레이더, 라이다 세 가지를 중심으로 각각의 특징과 장단점을 자세히 비교 분석해 보겠습니다.
1. 카메라 (The Visionary Eye):
- 작동 원리: 가시광선을 감지하여 2D 이미지를 생성합니다. 인간의 눈과 유사하게 작동하며, 색상, 형태, 질감 등 다양한 시각 정보를 획득합니다.
- 주요 장점:
- 풍부한 시각 정보: 높은 해상도의 컬러 이미지를 통해 객체의 종류(사람, 차량, 표지판 등)와 상태를 정확하게 식별하는 데 뛰어납니다.
- 저렴한 비용: 다른 주요 센서에 비해 상대적으로 생산 비용이 저렴하여 양산 차량에 널리 적용됩니다.
- 소프트웨어 발전: 딥러닝 기반의 이미지 인식 기술 발전으로 객체 인식률이 지속적으로 향상되고 있습니다.
- 주요 단점:
- 악천후에 취약: 안개, 비, 눈, 강한 햇빛 등 악조건에서는 시야 확보에 어려움을 겪으며 성능이 저하될 수 있습니다.
- 거리 측정 한계: 2D 이미지 기반으로는 정확한 거리 정보를 얻기 어렵습니다. 스테레오 카메라와 같은 추가적인 기술이 필요합니다.
- 야간 성능 저하: 빛이 부족한 환경에서는 인식률이 크게 떨어집니다.
2. 레이더 (The All-Weather Guardian):
- 작동 원리: 전파를 발사하여 주변 물체에서 반사되어 돌아오는 신호를 분석, 물체의 거리, 속도, 방향을 측정합니다.
- 주요 장점:
- 뛰어난 악천후 성능: 날씨 변화에 크게 영향을 받지 않아 안개, 비, 눈 속에서도 안정적인 성능을 유지합니다.
- 정확한 거리 및 속도 측정: 물체와의 거리와 상대 속도를 정확하게 파악하는 데 강점을 가집니다.
- 넓은 탐지 범위: 비교적 넓은 영역을 탐색할 수 있습니다.
- 주요 단점:
- 낮은 해상도: 카메라나 라이다에 비해 물체의 형태나 세부적인 특징을 식별하는 해상도가 낮습니다.
- 정적 객체 구분 어려움: 움직이지 않는 물체와 주변 환경을 구분하는 데 어려움을 겪을 수 있습니다.
- 전파 간섭 가능성: 다른 전자기기와의 간섭이 발생할 수 있습니다.
3. 라이다 (The Precision Mapper):
- 작동 원리: 레이저 광선을 발사하여 주변 물체에 반사되어 돌아오는 시간을 측정, 매우 정밀한 3차원 점군 데이터를 생성하여 주변 환경을 입체적으로 모델링합니다.
- 주요 장점:
- 높은 정밀도 및 해상도: 주변 환경의 형태, 크기, 위치 등을 매우 정확하게 파악할 수 있습니다.
- 3차원 공간 정보: 입체적인 정보를 제공하여 사물의 깊이와 공간 구조를 상세하게 이해할 수 있도록 돕습니다.
- 야간 성능 우수: 자체적으로 광원을 사용하므로 야간에도 비교적 안정적인 성능을 유지합니다.
- 주요 단점:
- 높은 비용: 다른 센서에 비해 가격이 비싸 자율주행차량의 전체 비용 상승 요인이 됩니다.
- 악천후에 민감: 짙은 안개, 폭우, 눈 등에 의해 레이저 광선이 산란되어 성능이 저하될 수 있습니다.
- 데이터 처리 부담: 생성되는 데이터 양이 많아 실시간 처리 능력이 요구됩니다.
왜 '함께' 써야 할까요? 센서 퓨전의 중요성
각 센서들은 분명 뛰어난 장점을 가지고 있지만, 동시에 명확한 한계 또한 존재합니다. 완벽하고 안전한 자율주행 시스템을 구축하기 위해서는 단일 센서에 의존하는 것이 아니라, 여러 종류의 센서를 '융합 (Fusion)'하여 사용하는 것이 필수적입니다.
센서 퓨전은 각 센서의 장점을 최대한 활용하고 단점을 상호 보완하여, 더욱 정확하고 신뢰성 있는 주변 환경 인식 능력을 확보하는 기술입니다. 마치 인간이 눈으로 보고 귀로 들으며 촉각으로 느끼는 다양한 감각 정보를 종합하여 상황을 판단하는 것과 유사한 원리입니다.
- 예시 1: 카메라 + 레이더: 카메라의 뛰어난 객체 식별 능력과 레이더의 정확한 거리 측정 능력을 결합하여 악천후 속에서도 보행자와 차량을 동시에 정확하게 감지할 수 있습니다.
- 예시 2: 라이다 + 카메라: 라이다의 정밀한 3차원 공간 정보와 카메라의 풍부한 시각 정보를 융합하여 더욱 완벽한 주변 환경 모델링 및 객체 인식이 가능해집니다.
미래를 향한 조화로운 협연
오늘 우리는 자율주행차의 핵심 센서들과 그들의 조화로운 협연, 즉 센서 퓨전의 중요성에 대해 자세히 알아보았습니다. 마치 각 악기가 고유의 음색으로 아름다운 음악을 만들어내듯, 각 센서는 고유한 방식으로 세상을 감지하고, 그 정보들이 융합될 때 비로소 안전하고 완벽한 자율주행의 미래가 현실로 다가올 것입니다.
Tech Knowledge Note는 앞으로도 자율주행 기술의 숨겨진 이야기들과 함께, 이 기술이 만들어갈 더욱 스마트하고 안전한 미래를 향해 함께 나아갈 것입니다. 다음 시간에는 자율주행차의 '두뇌' 역할을 수행하는 인공지능 (AI)이 센서 데이터를 어떻게 해석하고 판단하는지에 대한 흥미로운 여정을 떠나보겠습니다. 많은 기대 부탁드립니다!
'자율주행' 카테고리의 다른 글
| 도로 위의 천재 탐정: AI가 세상을 '인지'하는 놀라운 방법 (0) | 2025.07.02 |
|---|---|
| 인공지능이 운전하는 세상: 자율주행의 '두뇌'를 해부하다 (0) | 2025.07.01 |
| GPS 꺼져도 길 찾아요: 자율주행의 '잃어버린 나침반'을 되찾는 법 (0) | 2025.06.30 |
| 자율주행차의 눈과 귀: 센서, AI, 그리고 감춰진 국방 기술의 비밀 (0) | 2025.06.28 |
| [프롤로그] 자율주행, 당신이 모르는 미래의 시작은 이미 전장에도? (0) | 2025.06.27 |