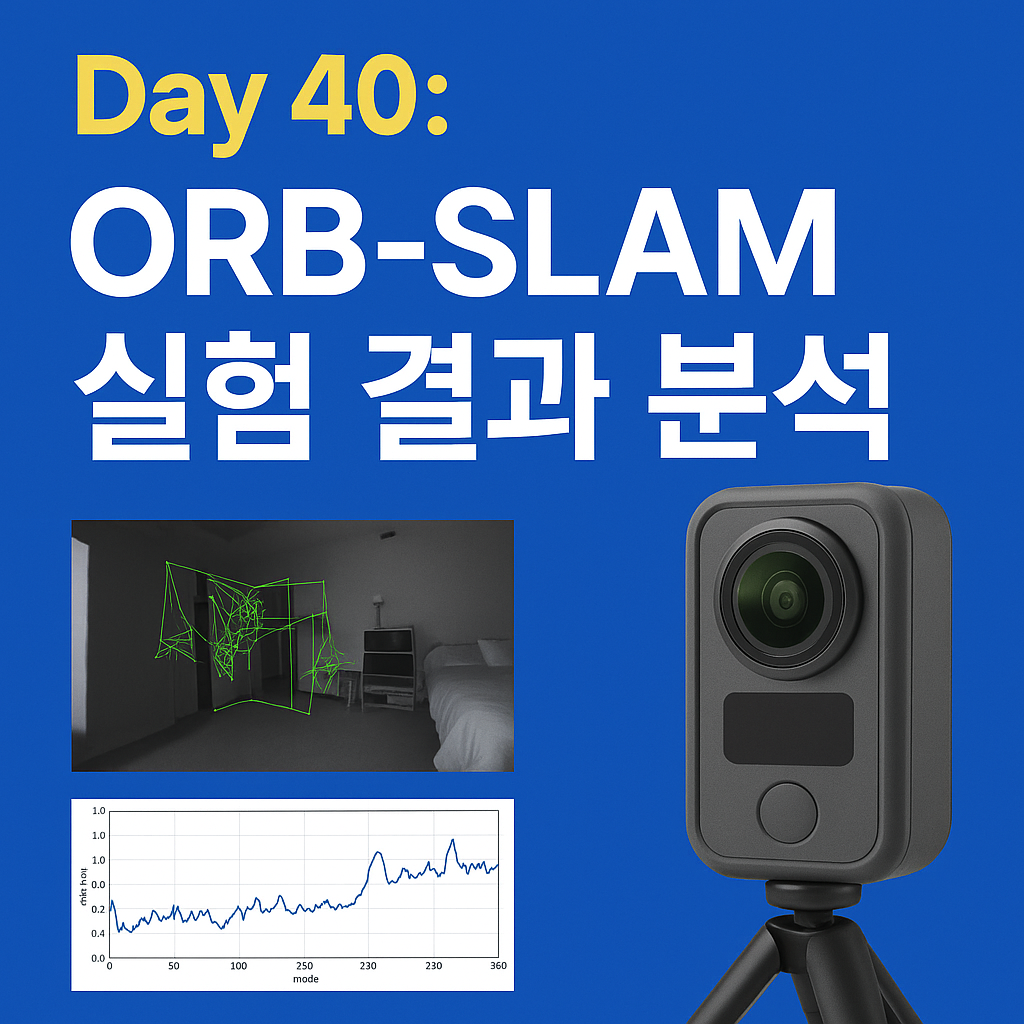
1. 서론지난 글에서는 ORB-SLAM의 키프레임 관리와 루프 클로징 원리를 살펴보았습니다.이제는 ORB-SLAM이 실제로 어떻게 작동하는지, 어떤 성능을 보이는지 직접 분석해보는 단계입니다.이번 글에서는 실제 실행 결과를 분석하여 SLAM의 정확도, 안정성, 지도 작성 품질을 평가하고, 이를 통해 ORB-SLAM의 장단점을 구체적으로 이해해보겠습니다.2. 실험 환경실험은 Ubuntu 20.04 환경의 ROS Noetic 기반에서 진행하였으며, Intel RealSense D435 카메라를 사용했습니다.하드웨어: i7 CPU, 16GB RAM, NVIDIA GPU센서: RGB-D 카메라 (RealSense D435)데이터셋: TUM RGB-D Dataset (freiburg1_xyz, fr2_desk 등..