반응형
안녕하세요! ✨
앞서 Day 10에서는 ROS2에서 Radar 센서 플러그인을 다루는 방법을 알아봤습니다.
오늘은 자율주행차 센서 중 가장 보편적이고 직관적인 카메라의 핵심 이론인 Pinhole Camera Model(핀홀 카메라 모델) 을 공부해보겠습니다.

🔍 Pinhole Camera Model이란?
핀홀 카메라 모델은 실제 카메라의 렌즈와 센서 동작을 단순화한 수학적 모델입니다.
- 핀홀(작은 구멍) 을 통해 들어온 빛이 뒤쪽의 이미지 평면(Image Plane) 에 맺히는 원리
- 실제 카메라의 광학 원리를 기초적으로 설명하는 데 가장 많이 사용
👉 이 모델은 컴퓨터 비전, 3D 재구성, 자율주행에서 좌표 변환의 기본 공식으로 활용됩니다.
🧮 수학적 관계
카메라 좌표계와 이미지 평면 사이의 관계는 다음과 같이 표현됩니다.
- 3D 점: (X,Y,Z)
- 2D 이미지 점: (x,y)
핀홀 모델에서는:
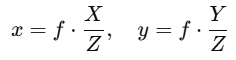
여기서 f 는 초점거리(focal length)입니다.
👉 즉, 멀리 있는 물체는 작게, 가까이 있는 물체는 크게 보이는 원리를 설명합니다.
🖼 직관적 이해
- 구멍을 통해 들어오는 빛: 한 점에서 들어온 빛만 통과
- 상 반전: 실제 물체는 거꾸로 뒤집혀 맺히지만, 좌표 변환으로 이를 보정
- 투영 원리: 3D 공간 → 2D 평면으로 투영되는 과정
🚘 자율주행에서의 의미
- 차선 인식: 카메라로 찍힌 영상 좌표를 실제 도로 좌표로 변환
- 객체 인식: 보행자, 차량, 신호등 등의 위치를 추정
- 3D 복원: 여러 대의 카메라를 이용한 스테레오 비전
👉 따라서 핀홀 카메라 모델은 자율주행차의 영상 기반 인식 알고리즘에서 핵심 기초 이론입니다.
📌 정리
- Pinhole Camera Model은 카메라 투영 원리를 단순화한 수학적 모델
- 3D 점을 2D 이미지 평면으로 변환하는 수학 공식 제공
- 자율주행에서 차선 인식, 객체 탐지, 스테레오 비전 등 다양한 분야에 응용
🚀 다음 글 예고
다음 글에서는 [Day 12: 카메라 캘리브레이션 (OpenCV 실습)] 을 다룹니다.
실제 카메라의 내부 파라미터(초점 거리, 왜곡 계수 등) 를 보정하는 방법을 OpenCV로 실습해보겠습니다.
✅ 오늘 글이 도움이 되셨다면 좋아요와 공유 부탁드립니다.
반응형
'자율주행' 카테고리의 다른 글
| 🎥 Day 13: 영상 처리 기초 (Canny Edge, Hough Transform) (0) | 2025.09.09 |
|---|---|
| 📸 Day 12: 카메라 캘리브레이션 (OpenCV 실습) (0) | 2025.09.08 |
| 🚗 Day 10: ROS2에서 Radar 센서 플러그인 다뤄보기 (0) | 2025.09.06 |
| 🚗 Day 9: Radar와 LiDAR 데이터 비교 (0) | 2025.09.05 |
| 🚗 Day 8: Python으로 Radar 거리·속도 추정 시뮬레이션 (0) | 2025.09.04 |